特許 ものづくり技術機械 目標9.産業と技術革新の基盤をつくろう システムデザイン研究科
多関節ロボットの動作経路生成方法 – 低計算負荷の方法を開発 –
掲載日:
ロボット、工場用ロボット、スマートファクトリー
どんなシーズなの?
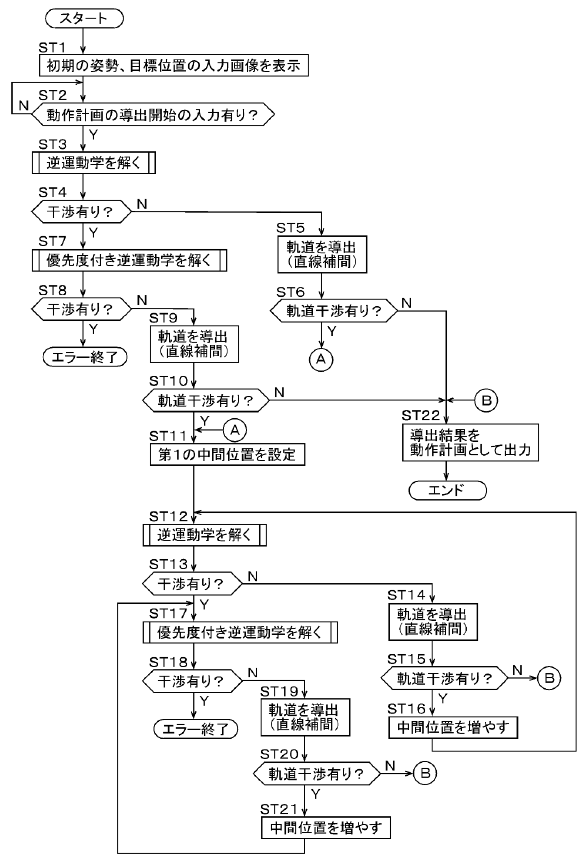
従来、ほとんどの多関節ロボットの動作計画計算は、関節空間上の経路計画問題に帰着させることによって動作計画を行っていましたが、この方法では、多次元空間上において自由度の大きいロボットを制御する場合、計算量が膨大となり、計算速度が遅くなるという課題がありました。
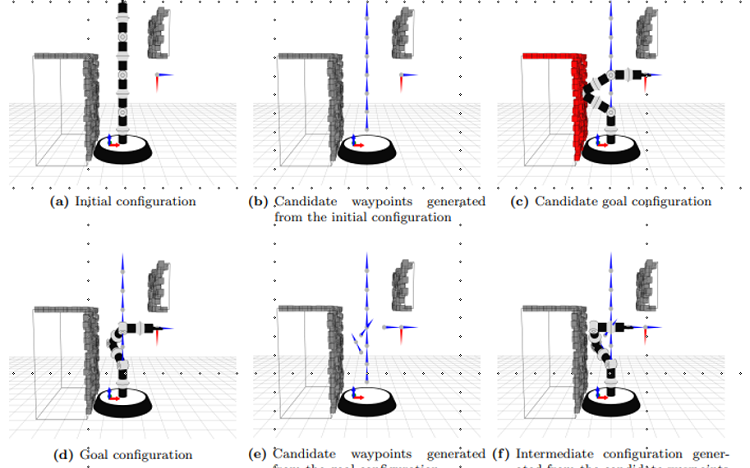
本技術は、多関節ロボットの制御システムに組み込まれる動作経路計算方法に関するものです。具体的には、動作計画の始点と終点におけるロボット全体の幾何学的性質を基に、3種類の逆運動学の数値解法を用い、動作の途中で手先が経由する位置・方向の候補を生成することによって、関節空間や経路計画を行わずに動作計画の計算ができ、従来技術よりも高速に動作計画の計算が可能になります。
こんなことに使える!
工場用ロボットや、その他様々なシーンで使用される多関節ロボットの制御システムに組み込むことが出来ます。
こんな研究室です!
武居研究室では、水上調査ロボット、地上移動ロボット、人協調ロボット、羽ばたき飛行ロボット、ロボットによる自動化技術などのロボット機構・ロボット運動制御・ロボットシステムの研究開発に取り組んでいます。
研究者
-
武居 直行 教授
- システムデザイン研究科
発明の名称
ロボットおよびロボット制御プログラム
番号
特願2020-167512
関連文献
始点と終点におけるロボット全体の幾何学的性質に基づいた冗長多関節ロボットの動作計画
https://doi.org/10.7210/jrsj.40.154