特許 ものづくり技術機械 目標8.働きがいも経済成長も目標12.つくる責任つかう責任 東京都立大学システムデザイン研究科
パッと一瞬で交換可能! 使い捨てできる紙製ロボットハンド
掲載日:
オリガミハンド、Folding Gripper、折りたたみ式指機構
どんなシーズなの?
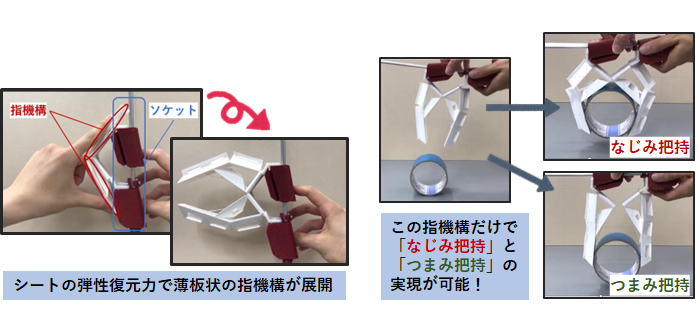
様々な形状の物体をつかむことが可能で、指機構を一瞬で交換することができるロボットハンドに関する発明です。指機構は、紙などの安価で使い捨て可能な素材を用いることができます。
先行技術でも、シート状の素材を折り曲げて指機構を組み立てるロボットハンドは存在します。金属等のハンドと比較して「修理交換が容易」という利点がありますが、組み立てた状態の指機構をコンパクトに収納することが難しいため、交換の度に組み立てる必要があり、作業効率の観点から改善の余地がありました。
こんなことに使える!
製品等との接触部であるロボットハンドの指機構を、頻繁に交換する必要がある現場、例えば食品や医薬品製造、医療分野など、高度な衛生管理が求められる現場での活用が期待されます。
本発明は、シート状の素材から組み立てた指機構を薄板状に折り畳み収納することができるため、小さいスペースでも複数の指機構を格納することができます。また、シートの弾性復元力で指機構が自然に展開することに加え、使用済み・未使用の指機構を自動的に交換できる仕組みも備わっているため、手を使わず効率的かつ衛生的に指機構を交換できます。
こんな研究室です!
和田研究室では、福祉施設や小売店舗、住空間で活躍するロボットの研究開発を行っています。新たなロボット技術の開発だけでなく、心理・生理・社会学的側面から開発したロボットを調査し、その有用性を評価する研究を行っています。
研究者
-
和田 一義 准教授
- システムデザイン研究科
発明の名称
対象把持装置、ハンド部およびハンド部組立用シート
番号
特開2023-065756
関連文献
Souta Tezuka and Kazuyoshi Wada, Proposal of a disposable and foldable finger for a robot hand, Proceedings of the 2022 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, pp.1507-1508, 2022.